詳解三次元点群処理に特徴点検出の一つHarri3Dが載っていたのでPCLで動かしてみました。
ほぼほぼ、サンプルのままです。
// // Created by natu on 2023/01/18. // #include <string> #include <pcl/keypoints/harris_3d.h> #include <pcl/io/ply_io.h> //https://github.com/PointCloudLibrary/pcl/blob/master/examples/keypoints/example_get_keypoints_indices.cpp int main(void) { // ここからダウンロード http://graphics.stanford.edu/data/3Dscanrep/ // bun_zipper.ply を Bunny.ply へrenameする。 std::string input_file_path = "/home/natu/gitproj/3dpcp_book_codes/3rdparty/Open3D/examples/test_data/Bunny.ply"; std::string keypoint_file_path = "/home/natu/tmp/keypoint.ply"; pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>); int ret = pcl::io::loadPLYFile<pcl::PointXYZ>(input_file_path, *cloud); if(ret == -1) { std::cout << "Error, can't read " << input_file_path << std::endl; return -1; } pcl::HarrisKeypoint3D <pcl::PointXYZ, pcl::PointXYZI> detector; pcl::PointCloud<pcl::PointXYZI>::Ptr keypoints (new pcl::PointCloud<pcl::PointXYZI>); detector.setNonMaxSupression (true); detector.setInputCloud (cloud); detector.setThreshold (1e-6); detector.compute (*keypoints); std::cout << "detected keypoint " << keypoints->size () << std::endl; pcl::PointIndicesConstPtr keypoints_indices = detector.getKeypointsIndices (); auto indices = keypoints_indices->indices; pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_result(new pcl::PointCloud<pcl::PointXYZRGB>); pcl::copyPointCloud(*cloud, *cloud_result); //Coloring for(int i=0;i<cloud_result->points.size ();++i) { cloud_result->points[i].r = 0; cloud_result->points[i].g = 0; cloud_result->points[i].b = 0; } for(int i: indices) { cloud_result->points[i].r = 255; cloud_result->points[i].g = 255; cloud_result->points[i].b = 0; } pcl::io::savePLYFile(keypoint_file_path, *cloud_result); return 0; }
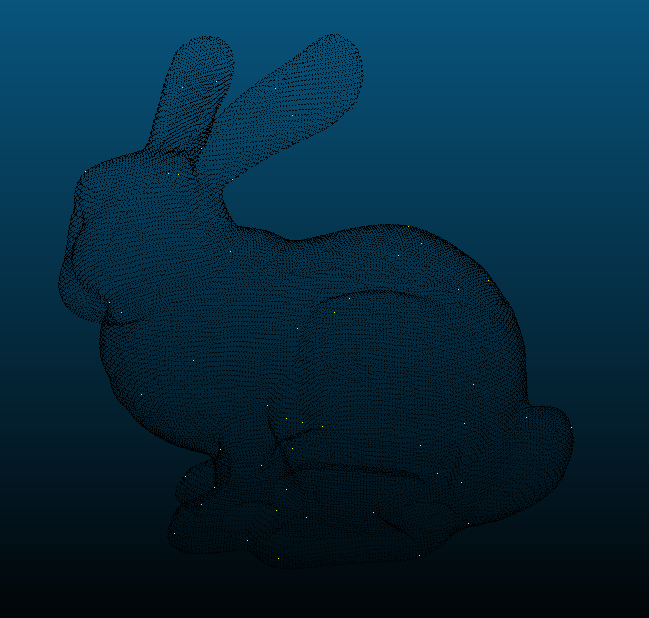
ちゃんと特徴点を抽出しています。