Modern Robotics: Mechanics, Planning, and Control
この本が教科書です。
教科書には行列Mが何度も出てきます。
Mは教科書に始めて登場するのは117ページ目で、ロボットがzero positionにいる時の手の先の場所と向きを表す行列です。
簡単な例
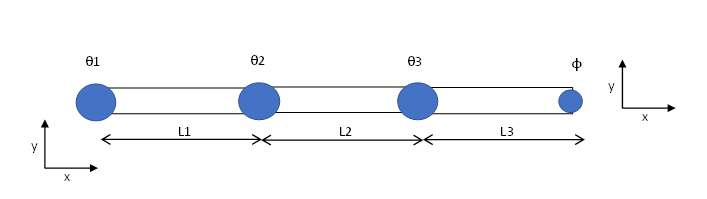
上の図がZero positionだとすると、Mはこうなります。
まず左上の3x3は座標軸の回転を表します。この図では回転していません。 画像処理で言うところの座標同士が歪まないので、一番下の段は(0, 0, 0, 1)で固定。numpy等でMを定義するとき右下の1を忘れがちなので注意。 一番右列が基準となる点からの(x,y,z)の座標。この組み合わせで上記のMになります。
難しい例

一番右の列は、基準となる座標系から見たエンドエフェクタの位置(座標)
を入れます。
ややこしいのは左上の3x3の部分です。 ここは基準となる座標系と、手の先の座標系のこの関係から持ってきます。
下の段は(0,0,0,1)なので、合わせると上の行列Mになります。